Definición de las oscilaciones
Un movimiento oscilatorio es un movimiento que se repite. Así pues, una oscilación es un movimiento de vaivén en torno a una posición de equilibrio. Una posición de equilibrio es un lugar en el que la fuerza neta que actúa sobre el sistema es cero. La cuerda vibrante de una guitarra es un ejemplo de oscilación.
La cuerda de una guitarra oscila, JAR (CC BY 2.0)
Periodo y frecuencia de las oscilaciones
La frecuencia se define como la inversa del periodo. Por ejemplo, un periodo grande implica una frecuencia pequeña.
$$f=\frac1T$$
Donde \ (f\) es la frecuencia en hercios, \( \mathrm{Hz}\), y \(T\) es el periodo en segundos, \ (\mathrm{s}\).
El periodo es el tiempo necesario para completar un ciclo de oscilación. El periodo de un ciclo de oscilación está relacionado con la frecuencia angular del movimiento del objeto. La expresión de la frecuencia angular dependerá del tipo de objeto que oscile. La ecuación que relaciona la frecuencia angular indicada por \(\omega\) con la frecuencia indicada por \(f\) es
$$\omega=2\pi f.$$
Sustituyendo \(\dfrac{1}{f}\) por \(T\) y reordenando para \(T\) obtenemos
$$T=\frac{2\pi}\omega.$$
Donde \ (\omega\) es la frecuencia angular en radianes por segundo, \(\frac{\mathrm{rad}}{\mathrm s}\). Si lo pensamos, esta expresión tiene sentido, ya que un objeto con una frecuencia angular grande tardará mucho menos en realizar un ciclo de oscilación completo.
Osciladores armónicos
Una oscilación arm ónica es un tipo de oscilación en la que la fuerza neta que actúa sobre el sistema es una fuerza restauradora. Una fuerza restauradora es una fuerza que actúa contra el desplazamiento para intentar que el sistema vuelva al equilibrio. Un ejemplo de ello es la Ley de Hooke dada por
$$F_s=ma_x=-k\Delta x,$$
donde \ (m\) es la masa del objeto en el extremo del muelle en kilogramos, \ (\mathrm{kg}\), \ (a_x\) es la aceleración del objeto en el \ (\text{ejex}\) en metros por segundo al cuadrado, \(\frac{\mathrm m}{\mathrm s^2}\), \ (k\) es la constante del muelle que mide la rigidez del muelle en newtons por metro, \ (\frac{\mathrm{N}}{\mathrm m}\), y \(\Delta x\) es el desplazamiento en metros, \ (\mathrm{m}\).
Si ésta es la única fuerza que actúa sobre el sistema, éste se denomina oscilador armónico simple. Éste es uno de los casos más sencillos, como su nombre indica.
La mayoría de las oscilaciones se producen en el aire o en otros medios, donde existe algún tipo de fuerza proporcional a la velocidad del sistema, como la resistencia del aire o las fuerzas de rozamiento. Éstas pueden actuar como fuerzas de amortiguación. La ecuación de la fuerza de amortiguación es
$$F_{amortiguación}=-cv,$$
donde \(c\) es una constante de amortiguación en kilogramos por segundo, \ ( \frac{\mathrm{kg}}{\mathrm s}}), y \(v\) es la velocidad en metros por segundo, \ (\frac{\mathrm{m}}{\mathrm s}}).
Como consecuencia, parte de la energía del sistema se disipa en vencer esta fuerza de amortiguación, por lo que la amplitud de la oscilación empezará a disminuir al llegar a cero. Este tipo de osciladores armónicos se denominan osciladores amortiguados. Podemos escribir la Segunda Ley de Newton para el caso en que sobre el sistema actúen una fuerza restauradora y una fuerza amortiguadora,
$$ma=-cv-kx.$$
Escribiendo la expresión anterior como una ecuación diferencial, obtenemos
$$m\frac{operador d^2x}{operador dt^2}+c\frac{operador dx}{operador dt}+kx=0.$$
La solución de la ecuación anterior es una función exponencial. El término de amortiguación disipará exponencialmente las oscilaciones hasta que el sistema descienda al reposo.
\[x=A_0e^-\gamma t}\cos\left(wt+\phi\right),\] donde \(\gamma=\frac c{2m}\)
$$x=A_0e^{-\frac c{2m}t}\cos\left(wt+\phi\right)$$
Podemos demostrar que ésta es una solución diferenciándola y sustituyéndola en la ecuación diferencial:
$$\begin{array}{rcl}{frac{operador dx}{operador dt}&=&-A_0\omega e^{-\frac c{2m}}sin(\omega t+\phi)\};-A_0\frac c{2m}e^-\frac c{2m}t}cos(\omega t+\phi)\frac{\mathrm d^2x}{\mathrm dt^2}&=&\begin{array}{c}-A_0\omega^2e^-\frac c{2m}t}\cos(\omega t+\phi)\};+A_0\omega\frac cme^-\frac c{2m}t}\sin(\omega t+\phi)\};+A_0\frac{c^2}{4m^2}e^{-\frac c{2m}t}\cos(\omega t+\phi)\end{array}\end{array}.$$
Ahora podemos volver a la ecuación diferencial y demostrar que hemos encontrado una solución para ella.
$$m\frac{operador d^2x}{operador dt^2}+c\frac{operador dx}{operador dt}+kx=0$$
$$\begin{array}{rcl}\frac{A_0c^2e^{\displaystyle\frac{-bt}{2m}}\cos\left(\omega t+\phi\right)}{4m}+\cancel{A_0c\omega e^\frac{-bt}{2m}\sin\left(\omega t+\phi\right)}\;-A_0\omega^2me^\frac{-bt}{2m}\cos\left(\omega t+\phi\right)\;-\frac{A_0c^2e^{\displaystyle\frac{-bt}{2m}}\cos\left(\omega t+\phi\right)}{2m}&-\cancel{A_0c\omega e^\frac{-bt}{2m}\sin\left(\omega t+\phi\right)}+A_0ke^\frac{-bt}{2m}\cos\left(\omega t+\phi\right)=&0\end{array}$$
$$\begin{array}{rcl}-\frac{\cancel{A_0}c^2\cancel{e^{\displaystyle\frac{-bt}{2m}}\cos\left(\omega t+\phi\right)}}{4m}-\cancel{A_0}\omega^2m\cancel{e^\frac{-bt}{2m}\cos\left(\omega t+\phi\right)}\;+\;\cancel{A_0}k\cancel{e^\frac{-bt}{2m}\cos\left(\omega t+\phi\right)}&=&0\end{array}$$
$$-\frac{c^2}{4m^2}-\omega^2+\frac km=0$$
$$\omega=\sqrt{\frac km-\frac{c^2}{4m^2}}.$$
Los osciladores amortiguados con oscilaciones y una amplitud que disminuye con el tiempo se llaman osciladores subamortiguados. Mientras que los que no oscilan y decaen inmediatamente a la posición de equilibrio se llaman osciladores sobreamortiguados. El límite entre la subamortiguación y la sobreamortiguación se denomina amortiguación crítica. Para confirmar que el oscilador amortiguado sufre amortiguamiento crítico, comprobamos que el coeficiente de amortiguamiento \(\gamma\) es igual a la frecuencia angular natural \(\omega_0\) del sistema. El coeficiente de amortiguación \(\gamma\) puede determinarse con la siguiente ecuación:
$$\gamma=\frac c{2m},$$
donde \(c\) es una constante de amortiguación medida en unidades de kilogramos por segundo, \(\frac{\mathrm{kg}}{\mathrm s}\), y \ (m\) es la masa del sistema en kilogramos, \ (\mathrm{m}\).
La frecuencia angular del oscilador amortiguado puede definirse en función del coeficiente de amortiguación y de la frecuencia angular natural.
$$\begin{array}{rcl}\omega&=&\sqrt{\frac km-\frac{c^2}{2m}}\\\omega&=&\sqrt{\omega_0-\gamma}\end{array}$$
Estos 3 casos pueden resumirse como sigue:
- Underdamping: ______________________________________________________________________________.
- Critical damping: ____ __________________________________________________________________________.
- Overdamping: ____ __________________________________________________________________________.
También existe otro tipo de osciladores llamados osciladores forzados. En éstos, las oscilaciones están provocadas por una fuerza externa que es una fuerza periódica. Si la frecuencia de esta fuerza es igual a la frecuencia natural del sistema, se produce un pico en la amplitud de oscilación. La frecuencia natural es la frecuencia a la que oscilará un objeto cuando se desplace fuera del equilibrio.
Oscilaciones en un sistema muelle-masa
Consideraremos el caso más sencillo de Movimiento Armónico Simple para comprender las oscilaciones en un sistema muelle-masa. Para un muelle, ya conocemos la ecuación de la segunda ley de Newton:
$$F_s=ma_x=-k\Delta x.$$
Reordenando para la aceleración obtenemos
$$a_x=-\frac km\Delta x.$$
Así, comparando la ecuación para un muelle con la ecuación general para el movimiento armónico \(a=-\omega_0^2x\), podemos deducir la frecuencia angular \(\omega\) para un muelle, que viene dada por la ecuación
$$\omega_0^2=\frac km,$$
expresada más explícitamente como
$$\omega_0=\sqrt{\frac km}.$$
Donde \ (m\) es la masa del objeto en el extremo del muelle en kilogramos, \(\mathrm{kg}\), y \ (k\) es la constante del muelle que mide la rigidez del muelle en newtons por metro, \(\frac{\mathrm N}{\mathrm m}\).
La fórmula del periodo de tiempo de un sistema muelle-masa oscilante es
$$T_s=2\pi\sqrt{\frac mk}.$$
¿Cuál es el periodo de oscilación de un sistema muelle-masa con una masa de \(4;{\mathrm{kg}) y una constante de muelle de \(1;{\textstyle\frac{\mathrm N}{\mathrm m}})?
$$T_s=2\pi\sqrt{\frac{4\;\mathrm{kg}}{1\;{\displaystyle\frac{\mathrm N}{\mathrm m}}}}$$
$$T_s=2\pi\sqrt{\frac{4\;\mathrm{kg}}{1\;{\displaystyle\frac{\frac{m\;kg}{s^2}}m}}}$$
$$T_s=4\pi;\mathrm s$$
Gráfico de las oscilaciones
Si representamos gráficamente el desplazamiento en función del tiempo de un objeto que experimenta un movimiento armónico simple, identificaríamos el periodo como el tiempo transcurrido entre dos picos consecutivos o dos puntos análogos cualesquiera de dos ondas con la misma fase. Para localizar la amplitud, nos fijamos en el pico más alto de la distancia.
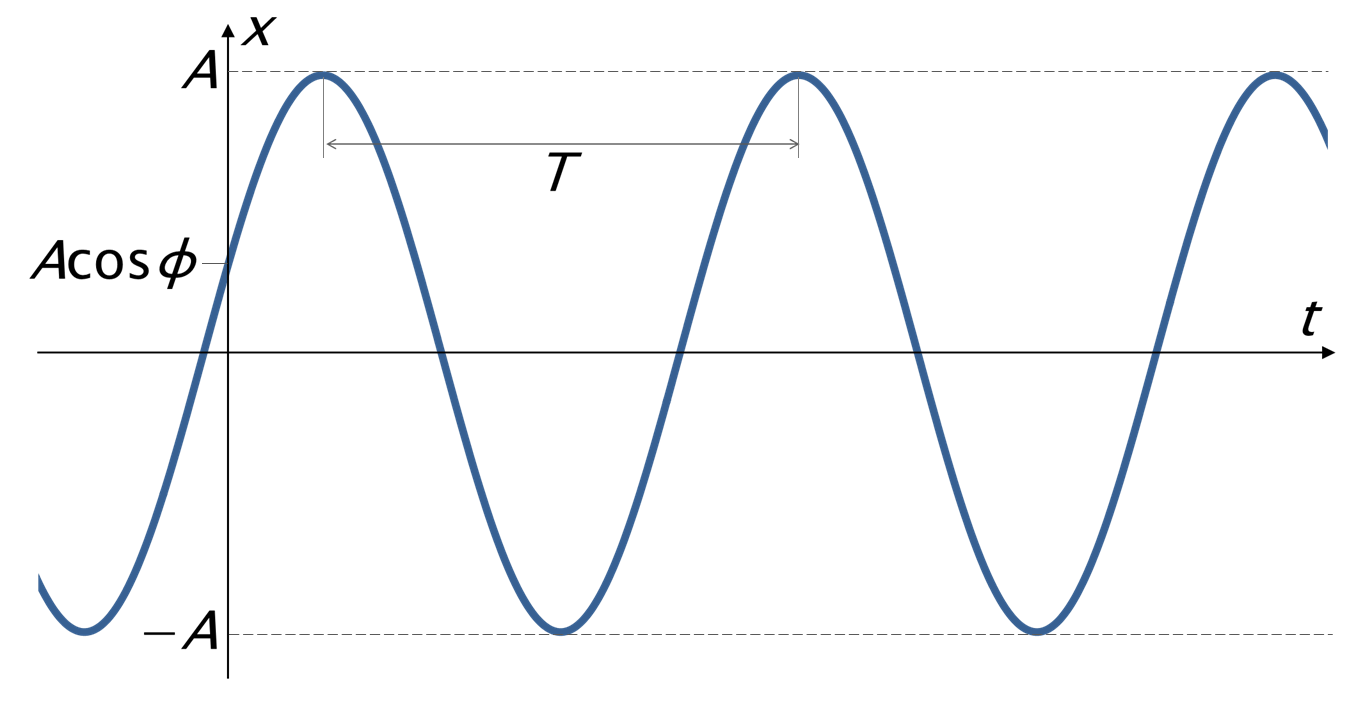
Desplazamiento vs Tiempo para un sistema en movimiento armónico simple. A partir de este gráfico, podemos identificar la amplitud y el periodo de oscilación, Yapparina, Wikimedia Commons (CC0 1.0).
También podemos representar gráficamente el desplazamiento en función del tiempo de los osciladores amortiguados, para comprender y comparar visualmente sus características. La amortiguación crítica proporciona el camino más rápido para que la amplitud llegue a cero. Una amortiguación excesivate lleva más rápidamente a la posición cero, pero siguen produciéndose oscilaciones decrecientes. Las oscilaciones insuficientementeamortiguadas tardan más tiempo en alcanzar la amplitud cero.
Oscilaciones - Puntos clave
- Una oscilación es un movimiento de vaivén en torno a una posición de equilibrio. Una posición de equilibrio es un lugar en el que la fuerza neta que actúa sobre el sistema es cero.
- Unaoscilación armónica es un tipo de oscilación en la que la fuerza neta que actúa sobre el sistema es una fuerza restauradora. Una fuerza restauradora es una fuerza que actúa contra el desplazamiento para intentar que el sistema vuelva al equilibrio.
- El periodo es el tiempo necesario para completar un ciclo de oscilación. La frecuencia se define como el recíproco del periodo, \(f=\frac1T\).
- Si la fuerza restauradora es la única que actúa sobre el sistema, éste se denomina oscilador armónico simple. Sobre un sistema oscilante también puede actuar una fuerza amortiguadora. Se trata de algún tipo de fuerza proporcional a la velocidad del sistema, como la resistencia del aire o las fuerzas de rozamiento, \(F_{amortiguamiento}=-cv\).
En los osciladores amortiguados , parte de la energía del sistema se disipa al vencer la fuerza de amortiguación, por lo que la amplitud de la oscilación empezará a disminuir al llegar a cero. Los osciladores amortiguadoscon oscilaciones y una amplitud que disminuye con el tiempo se denominan osciladores subamortiguados. Los osciladores sobreamortiguados son los que no oscilan y decaen inmediatamente a la posición de equilibrio.
El límite entre un oscilador subamortiguado y uno sobreamortiguado se denomina amortiguamiento crítico. Para confirmar que el oscilador amortiguado está sufriendo un amortiguamiento crítico, comprobamos que el coeficiente de amortiguamiento \(\gamma=\frac c{2m}\) es igual a la frecuencia angular del sistema \(\omega=2\pi f\). Estos tres casos pueden resumirse como sigue:
- Amortiguación insuficiente: \(\omega_0>\gamma\)
- Amortiguamiento crítico: \(\omega_0=\gamma\)
- Amortiguación excesiva: \(\omega_0<\gamma\)
Enlos osciladores forzados, las oscilaciones están provocadas por una fuerza externa que es una fuerza periódica. Si la frecuencia de esta fuerza es igual a la frecuencia natural del sistema, se produce un pico en la amplitud de oscilación.





